Features in detail
Power flow analysis
In order to analyse voltages and line loadings a non-linear power flow analysis (PF) using pypsa is conducted. All loads and generators are modelled as PQ nodes. The slack is positioned at the substation’s secondary side.
Multi period optimal power flow
Warning
The non-linear optimal power flow is currently not maintained and might not work out of the box!
Todo
Add
Grid expansion
General methodology
The grid expansion methodology is conducted in reinforce_grid().
The order grid expansion measures are conducted is as follows:
Reinforce stations and lines due to overloading issues
Reinforce lines in MV grid due to voltage issues
Reinforce distribution substations due to voltage issues
Reinforce lines in LV grid due to voltage issues
Reinforce stations and lines due to overloading issues
Reinforcement of stations and lines due to overloading issues is performed twice, once in the beginning and again after fixing voltage issues, as the changed power flows after reinforcing the grid may lead to new overloading issues. How voltage and overloading issues are identified and solved is shown in figure Grid expansion measures and further explained in the following sections.
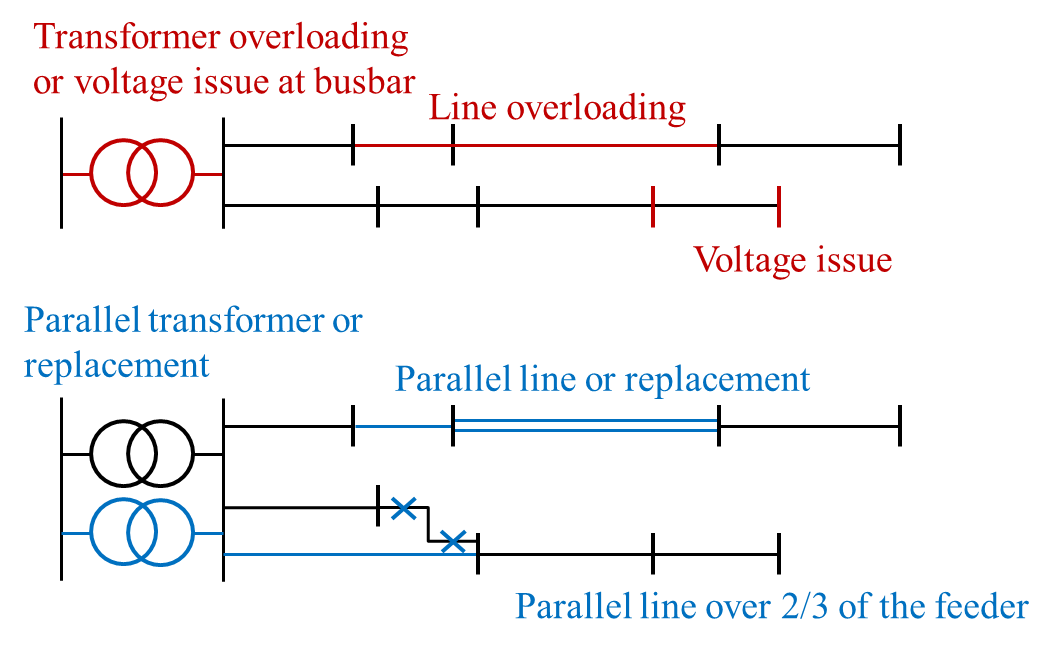
Fig. 1 Grid expansion measures
reinforce_grid() offers a few additional options. It is e.g. possible to conduct grid
reinforcement measures on a copy
of the graph so that the original grid topology is not changed. It is also possible to only identify necessary
reinforcement measures for two worst-case snapshots in order to save computing time and to set combined or separate
allowed voltage deviation limits for MV and LV.
See documentation of reinforce_grid() for more information.
Identification of overloading and voltage issues
Identification of overloading and voltage issues is conducted in
check_tech_constraints.
Voltage issues are determined based on allowed voltage deviations set in the config file
config_grid_expansion in section grid_expansion_allowed_voltage_deviations. It is possible
to set one allowed voltage deviation that is used for MV and LV or define separate allowed voltage deviations.
Which allowed voltage deviation is used is defined through the parameter split_voltage_band of reinforce_grid().
By default split_voltage_band is set to True, resulting in separate voltage limits for MV and LV, as a combined limits
may currently lead to problems if voltage deviation in MV grid is already close to the allowed limit, in which case the remaining allowed voltage deviation in the LV grids is close to zero.
Overloading is determined based on allowed load factors that are also defined in the config file config_grid_expansion in section grid_expansion_load_factors.
Allowed voltage deviations as well as load factors are in most cases different for load and feed-in case. Load and feed-in case are commonly used worst-cases for grid expansion analyses. Load case defines a situation where all loads in the grid have a high demand while feed-in by generators is low or zero. In this case power is flowing from the high-voltage grid to the distribution grid. In the feed-in case there is a high generator feed-in and a small energy demand leading to a reversed power flow. Load and generation assumptions for the two worst-cases are definded in the config file config_timeseries in section worst_case_scale_factor (scale factors describe actual power to nominal power ratio of generators and loads).
When conducting grid reinforcement based on given time series instead of worst-case assumptions, load and feed-in case also need to be definded to determine allowed voltage deviations and load factors. Therefore, the two cases are identified based on the generation and load time series of all loads and generators in the grid and defined as follows:
Load case: positive (
 -
-  )
)Feed-in case: negative (
- ) -> reverse power flow at HV/MV substation
Grid losses are not taken into account. See timesteps_load_feedin_case() for more
details and implementation.
Check line load
Exceedance of allowed line load of MV and LV lines is checked in
mv_line_overload()andlv_line_oveload(), respectively. The functions use the given load factor and the maximum allowed current given by the manufacturer (see I_max_th in tables LV cables, MV cables and MV overhead lines) to calculate the allowed line load of each LV and MV line. If the line load calculated in the power flow analysis exceeds the allowed line load, the line is reinforced (see Reinforce lines due to overloading issues).
Check station load
Exceedance of allowed station load of HV/MV and MV/LV stations is checked in
hv_mv_station_overload()andmv_lv_station_overload(), respectively. The functions use the given load factor and the maximum allowed apparent power given by the manufacturer (see S_nom in tables LV transformers, and MV transformers) to calculate the allowed apparent power of the stations. If the apparent power calculated in the power flow analysis exceeds the allowed apparent power the station is reinforced (see Reinforce stations due to overloading issues).
Check line and station voltage deviation
Compliance with allowed voltage deviation limits in MV and LV grids is checked in
mv_voltage_issue()andlv_voltage_issue(), respectively. The functions check if the voltage deviation at a node calculated in the power flow analysis exceeds the allowed voltage deviation. If it does, the line is reinforced (see Reinforce MV/LV stations due to voltage issues or Reinforce lines due to voltage).
Grid expansion measures
Reinforcement measures are conducted in reinforce_measures. Whereas overloading issues can usually be solved in one step, except for
some cases where the lowered grid impedance through reinforcement measures leads to new issues, voltage issues can only be solved iteratively. This means that after each reinforcement
step a power flow analysis is conducted and the voltage rechecked. An upper limit for how many iteration steps should be performed is set in order to avoid endless iteration. By
default it is set to 10 but can be changed using the parameter max_while_iterations of reinforce_grid().
Reinforce lines due to overloading issues
Line reinforcement due to overloading is conducted in
reinforce_lines_overloading(). In a first step a parallel line of the same line type is installed. If this does not solve the overloading issue as many parallel standard lines as needed are installed.
Reinforce stations due to overloading issues
Reinforcement of HV/MV and MV/LV stations due to overloading is conducted in
reinforce_hv_mv_station_overloading()andreinforce_mv_lv_station_overloading(), respectively. In a first step a parallel transformer of the same type as the existing transformer is installed. If there is more than one transformer in the station the smallest transformer that will solve the overloading issue is used. If this does not solve the overloading issue as many parallel standard transformers as needed are installed.
Reinforce MV/LV stations due to voltage issues
Reinforcement of MV/LV stations due to voltage issues is conducted in
reinforce_mv_lv_station_voltage_issues(). To solve voltage issues, a parallel standard transformer is installed.After each station with voltage issues is reinforced, a power flow analysis is conducted and the voltage rechecked. If there are still voltage issues the process of installing a parallel standard transformer and conducting a power flow analysis is repeated until voltage issues are solved or until the maximum number of allowed iterations is reached.
Reinforce lines due to voltage
Reinforcement of lines due to voltage issues is conducted in
reinforce_lines_voltage_issues(). In the case of several voltage issues the path to the node with the highest voltage deviation is reinforced first. Therefore, the line between the secondary side of the station and the node with the highest voltage deviation is disconnected at a distribution substation after 2/3 of the path length. If there is no distribution substation where the line can be disconnected, the node is directly connected to the busbar. If the node is already directly connected to the busbar a parallel standard line is installed.Only one voltage problem for each feeder is considered at a time since each measure effects the voltage of each node in that feeder.
After each feeder with voltage problems has been considered, a power flow analysis is conducted and the voltage rechecked. The process of solving voltage issues is repeated until voltage issues are solved or until the maximum number of allowed iterations is reached.
Grid expansion costs
Total grid expansion costs are the sum of costs for each added transformer and line.
Costs for lines and transformers are only distinguished by the voltage level they are installed in
and not by the different types.
In the case of lines it is further taken into account wether the line is installed in a rural or an urban area, whereas rural areas
are areas with a population density smaller or equal to 500 people per km² and urban areas are defined as areas
with a population density higher than 500 people per km² [DENA].
The population density is calculated by the population and area of the grid district the line is in (See Grid).
Costs for lines of aggregated loads and generators are not considered in the costs calculation since grids of aggregated areas are not modeled but aggregated loads and generators are directly connected to the MV busbar.
Curtailment
Warning
The curtailment methods are not yet adapted to the refactored code and therefore currently do not work.
eDisGo right now provides two curtailment methodologies called ‘feedin-proportional’ and ‘voltage-based’, that are implemented in
curtailment.
Both methods are intended to take a given curtailment target obtained from an optimization of the EHV and HV grids using
eTraGo and allocate it to the generation units in the grids. Curtailment targets can be specified for all
wind and solar generators,
by generator type (solar or wind) or by generator type in a given weather cell.
It is also possible to curtail specific generators internally, though a user friendly implementation is still in the works.
‘feedin-proportional’
The ‘feedin-proportional’ curtailment is implemented in
feedin_proportional(). The curtailment that has to be met in each time step is allocated equally to all generators depending on their share of total feed-in in that time step.
where
is the curtailed power of generator
in timestep
,
is the weather-dependent availability of generator
is the given curtailment target (power) for timestep

‘voltage-based’
The ‘voltage-based’ curtailment is implemented in
voltage_based(). The curtailment that has to be met in each time step is allocated to all generators depending on the exceedance of the allowed voltage deviation at the nodes of the generators. The higher the exceedance, the higher the curtailment.The optional parameter voltage_threshold specifies the threshold for the exceedance of the allowed voltage deviation above which a generator is curtailed. By default it is set to zero, meaning that all generators at nodes with voltage deviations that exceed the allowed voltage deviation are curtailed. Generators at nodes where the allowed voltage deviation is not exceeded are not curtailed. In the case that the required curtailment exceeds the weather-dependent availability of all generators with voltage deviations above the specified threshold, the voltage threshold is lowered in steps of 0.01 p.u. until the curtailment target can be met.
Above the threshold, the curtailment is proportional to the exceedance of the allowed voltage deviation.
where
is the voltage at generator
is the voltage threshold for generator
where
is the voltage at the station’s secondary side,
is the allowed voltage deviation in the reverse power flow and
is the exceedance of the allowed voltage deviation above which generators are curtailed.
and
in the equation above are slope and y-intercept of a linear relation between the curtailment and the exceedance of the allowed voltage deviation. They are calculated by solving the following linear problem that penalizes the offset using the python package pyomo:
where


Electromobility integration
The import and integration of electromobility data is implemented in electromobility_import().
Allocation of charging demand
The allocation of charging processes to charging stations is implemented in
distribute_charging_demand().
After electromobility data is loaded, the charging demand from SimBEV is allocated to potential charging parks
from TracBEV. The allocation of the charging processes to the charging infrastructure is carried out with the
help of the weighting factor of the potential charging parks determined by TracBEV. This involves a random and
weighted selection of one charging park per charging process. In the case of private charging infrastructure, a
separate charging point is set up for each electric vehicle (EV). All charging processes of the respective EV and charging use case
are assigned to this charging point. The allocation of private charging processes to charging stations is
implemented in distribute_private_charging_demand().
For public charging infrastructure, the allocation is made explicitly per charging process. For each charging
process it is determined whether a suitable charging point is already available. For this purpose it is checked
whether the charging point is occupied by another EV in the corresponding period and whether it can provide the
corresponding charging capacity. If no suitable charging point is available, a charging point is determined
randomly and weighted in the same way as for private charging. The allocation of public charging processes to
charging stations is implemented in distribute_public_charging_demand().
Charging strategies
eDisGo right now provides three charging strategy methodologies called ‘dumb’, ‘reduced’ and ‘residual’, that
are implemented in charging_strategies.
The aim of the charging strategies ‘reduced’ and ‘residual’ is to generate the most grid-friendly charging behavior possible without
restricting the convenience for end users. Therefore, the boundary condition of all charging strategies is that
the charging requirement of each charging process must be fully covered. This means that charging processes can
only be flexibilised if the EV can be fully charged while it is stationary. Furthermore, only private
charging processes can be used as a flexibility, since the fulfillment of the service is the priority for public
charging processes.
‘dumb’
In this charging strategy the cars are charged directly after arrival with the maximum possible charging capacity.
‘reduced’
This is a preventive charging strategy. The cars are charged directly after arrival with the minimum possible charging power. The minimum possible charging power is determined by the parking time and the parameter minimum_charging_capacity_factor.
‘residual’
This is an active charging strategy. The cars are charged when the residual load in the MV grid is lowest (high generation and low consumption). Charging processes with a low flexibility are given priority.
Storage integration
Warning
The storage integration methods described below are not yet adapted to the refactored code and therefore currently do not work.
Besides the possibility to connect a storage with a given operation to any node in the
grid, eDisGo provides a methodology that takes
a given storage capacity and allocates it to multiple smaller storage units such that it
reduces line overloading and voltage deviations.
The methodology is implemented in one_storage_per_feeder().
As the above described
curtailment allocation methodologies it is intended to be used in combination
with eTraGo where
storage capacity and operation is optimized.
For each feeder with load or voltage issues it is checked if integrating a storage will reduce peaks in the feeder, starting with the feeder with the highest theoretical grid expansion costs. A heuristic approach is used to estimate storage sizing and siting while storage operation is carried over from the given storage operation.
A more thorough documentation will follow soon.
Spatial complexity reduction
eDisGo offers several methods for spatial complexity reduction. The methods reduce the number of nodes in the grid through a spatial clustering. For all methods it is a two-step procedure. At first, a busmap is determined, mapping each bus in the original grid to a new bus in the clustered grid. Then, according to the busmap, the eDisGo object is reduced. Some parts of the methods are based on the spatial clustering of [PyPSA].
You can apply the complexity reduction by calling the function
spatial_complexity_reduction.
Important is that all grid buses have coordinates and the line length can be calculated through the Euclidean distance and a detour factor. If the grids do not match these conditions, the complexity reduction might not work as expected. If your grid does not have coordinates, you can calculate new coordinates by setting the parameter ‘apply_pseudo_coordinates’ to True (which is the default). Then coordinates for the grids are calculated based on the tree/radial topology of the grid graph.
The methods are selected through the ‘mode’ parameter. There are four methods implemented: ‘kmeans’, ‘kmeansdijkstra’, ‘aggregate_to_main_feeder’ and ‘equidistant_nodes’. Every node of the grid is assigned to a new node with new coordinates.
‘kmeans’ - Assignment to cluster centers of the K-Means clustering.
‘kmeansdijkstra’ - Assignment to the nearest nodes of the cluster center through the distance in the graph. For distance calculation, the Dijkstra algorithm is used.
‘aggregate_to_main_feeder’ - Assignment to the nearest node of the main feeder.
‘equidistant_nodes’ - Distribute nodes equidistant on the main feeder and then assign main feeder nodes to the new nodes.
Different cluster areas can be selected through the parameter ‘cluster_area’. The cluster area is the area on which the clustering method is applied. You can choose between: ‘grid’, ‘feeder’ and ‘main_feeder’. The main feeder is defined as the longest path in the feeder and is calculated with the method ‘aggregate_to_main_feeder’.
The reduction factor describes how great the reduction of nodes is and can be set through the parameter ‘reduction_factor’. A small reduction factor leads to a big reduction of the number of nodes and vice versa.

Also, there is the possibility to reduce the number of nodes to a larger degree in areas with no predicted reinforcement through the parameter ‘reduction_factor_not_focused’. The areas which are not focused, are the areas that do not have components with voltage and overloading problems in the worst case power flow.
For the reduction of the grid graph, the function apply_busmap() is used.
With this method, every line and all their
parameters are recalculated and sometimes lines are combined to a new line. This is the part where the magic of
reducing the grid object happens. For more information, read: [HoerschBrown] and [SCR].
If you want more flexibility in using the complexity reduction, you can also run the functions manually:
from edisgo.tools.spatial_complexity_reduction import make_busmap, apply_busmap
from edisgo.tools.pseudo_coordinates import make_pseudo_coordinates
# create pseudo coordinates
edisgo_obj = make_pseudo_coordinates(edisgo_obj)
# determine busmap
busmap_df = make_busmap(
edisgo_obj,
mode=mode, # 'kmeans', 'kmeansdijkstra', 'aggregate_to_main_feeder' or 'equidistant_nodes'
cluster_area=cluster_area, # 'grid' or 'feeder' or 'main_feeder'
reduction_factor=k_rf, # 0 < k_rf < 1
reduction_factor_not_focused=k_rf_not_focused', # 0 <= k_rf_not_focused < 1
)
# reduce EDisGo object
edisgo_reduced, linemap_df = apply_busmap(edisgo_obj, busmap_df)
For more details see the API documentation or the thesis where the methods were implemented and tested [SCR].